Вертолет Ingenuity успешно совершил девятый полет над Марсом
 Аппарат перемещается с одного места на другое, чтобы проверить функционирование своей навигационной системы.
Аппарат перемещается с одного места на другое, чтобы проверить функционирование своей навигационной системы.Вертолет-дрон Ingenuity успешно совершил полет над поверхностью Марса, проведя ряд испытаний систем навигации и электросвязи. Об этом в понедельник, 5 июля, говорится в сообщении, размещенном в Twitter лаборатории реактивного движения NASA.
"Марсианский вертолет раздвигает границы Красной планеты. Вертолет завершил девятый и наиболее сложный до нынешнего момента полет, пролетев 166,4 секунды со скоростью 5 м/с", - говорится в сообщении.
Вертолет должен был испытать навигационный алгоритм Ingenuity, который позволяет Ingenuity определять местонахождение на траектории полета.
"Он был разработан для полета над плоской поверхностью, и не имеет конструктивных особенностей, позволяющих приспособиться к полетам над крутыми склонами и неровными поверхностями", - уточнили разработчики.
При приземлении аппарата проверялись возможности системы электросвязи, созданной с расчетом на то, что сигнал может быть передан, если на его пути "нет препятствий" на протяжении нескольких сотен метров, к передаче данных.
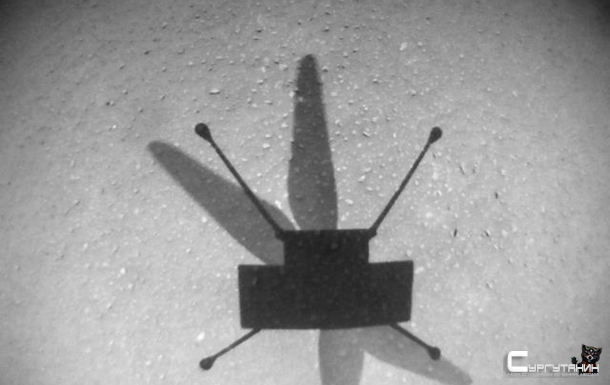
Во время работы аппарату удалось сделать несколько качественных снимков во время движения.
Аппарат Ingenuity 1,2 метра в диаметре и весом 1,8 кг оснащен двумя камерами, способен зависать в воздухе на 20-30 секунд для фотографирования местности.
Напомним, мини-вертолет Ingenuity прибыл на Марс вместе с ровером Perseverance. Свой первый испытательный полет он совершил 19 апреля, поднявшись на 30 секунд на три метра.